ROS2 异步机制
ROS2 异步机制
代码地址:https://github.com/liugehaizaixue/python_ros2_note/tree/main
pub
ros2 基础的pub节点
发布消息(测试用)
ros2多线程回调
rclpy库和asyncio库在事件循环上有冲突,因此无法直接在ROS2的回调函数中使用asyncio.sleep()
经常会遇到如下现象
ros2_sub_problem_recurrence
在单线程的情况下,当一个回调函数被阻塞时,其他回调函数也将无法执行,直到阻塞的回调函数完成。因此,如果my_callback函数的执行时间很长,它会阻塞整个节点的运行,从而导致其他回调函数(包括my_callback_2)无法及时响应消息。如果需要同时处理多个回调函数或避免阻塞,可以考虑使用多线程或异步编程技术。
ROS(机器人操作系统)中的一个节点通常是一个单线程的执行单元。每个节点在自己的线程中独立运行,并与其他节点进行通信。这种设计可以确保节点之间的数据交换和处理的实时性和可靠性。然而,也可以使用多线程来实现多个并发任务,但在节点级别上,默认情况下是单线程的。请注意,具体的实现方式可能会根据节点的需求和开发者的选择而有所不同。
或启两个节点,这两个节点共同操作同一个变量,可以使用ROS参数服务器(Parameter Server)来实现。ROS参数服务器是一个全局存储空间,可以在不同的节点之间共享数据。
此时如果想实现以下效果
callback1 在执行过程中使用callback2获取的当前(较新的)数据时,可以延迟执行callback1中的部分内容。
CallbackGroup
ROS2-Using-callback-groups
当面对只有一个node节点时,程序的调用是线性的,此时可以使用使用执行器和回调组完成多线程的创建。
MutuallyExclusive;互斥,即这个组别中每时刻只允许1个线程,一个callback在执行时,其他只能等待Reentrant;可重入,这个组别中每时刻允许多个线程,一个Callback在执行时,其他callback可开启新的线程
这样我们可以有效地对ROS2中的callback程序进行控制。在ROS2的node中默认组别是MutuallyExclusive类型,即便使用了multiThreadedExecutor,也依然默认MutuallyExclusive类型,所以我们可以按照我们的需求来进行设置。
执行方式
- 互斥回调组防止其回调 并行执行 - 本质上使组中的回调变得好像 由单线程执行器执行。
- 重入回调组允许执行者调度和执行 该组以它认为合适的任何方式进行回调,不受限制。 这意味着,除了并行运行不同的回调之外 彼此之间,同一回调的不同实例也可能是 同时执行。
- 属于不同回调组(任何类型)的回调始终可以 彼此并行执行。
控制执行
-
注册不应与同一回调并行执行的回调 互斥回调组。 一个示例案例可能是回调正在访问共享 关键和非线程安全资源。
-
如果您有一个回调,其执行实例需要能够重叠 彼此之间,将其注册到可重入回调组。 一个示例案例可能是需要能够处理的操作服务器 多个操作调用彼此并行。
-
如果您有可能需要执行的不同回调 彼此并行,将它们注册到
- 可重入回调组,或
不同的互斥回调组(此选项很好,如果您 希望回调不重叠或也需要线程 关于其他一些回调的安全性) 或任何类型的不同回调组(根据选择类型 到其他标准)。
MutuallyExclusive互斥回调组
ros2_sub_MutuallyExclusiveCallbackGroup
此处使用不同的互斥回调组,即可完美解决上述问题,具体实现参考👆
创建不同的互斥回调组的方法
my_cb_group_1 = MutuallyExclusiveCallbackGroup()
my_cb_group_2 = MutuallyExclusiveCallbackGroup()
my_cb_group_1 = MutuallyExclusiveCallbackGroup()
my_cb_group_2 = None
其具体实现效果如下所示:
如图所示,callback_1的回调执行被阻塞,但callback_2的执行完全不受影响。
ReentrantCallbackGroup可重入回调组
ros2_sub_ReentrantCallbackGroup
可重入回调组的运行结果,与不同的互斥有所区别。
根据如下运行结果,可明显看到差异。
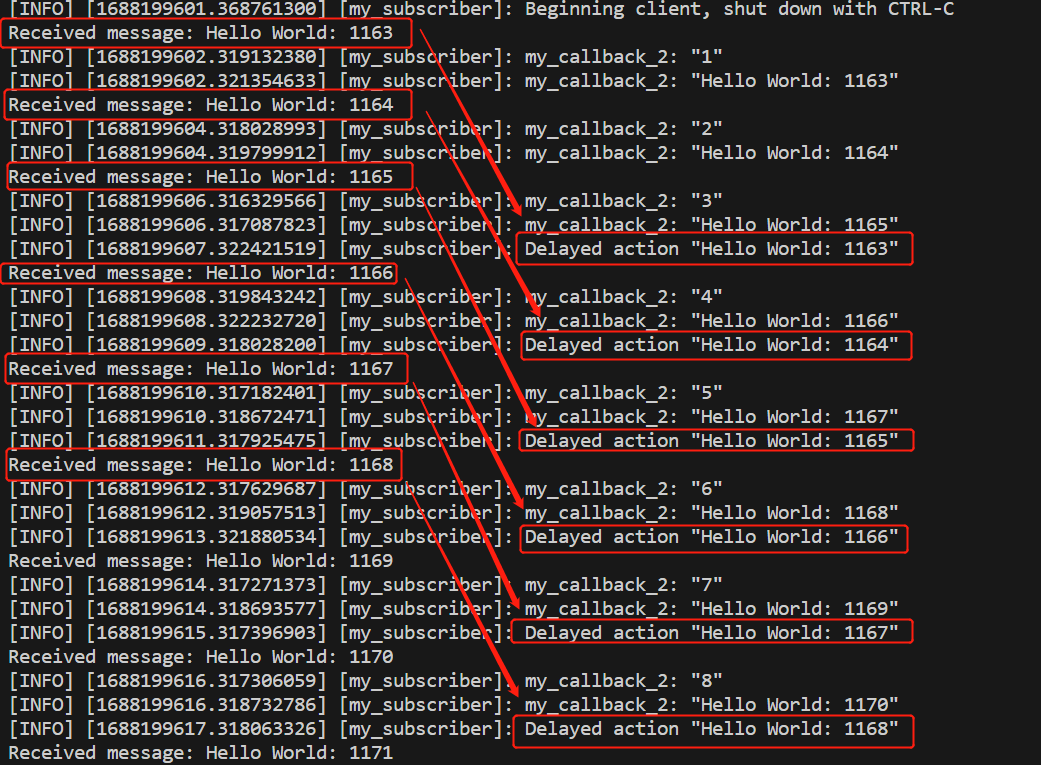
如图所示,callback_2仍不受callback_1的干扰。而两者的区别在于,再可重入下,callback_1的回调创建了多个线程,而互斥回调组下,仍保持一个线程。
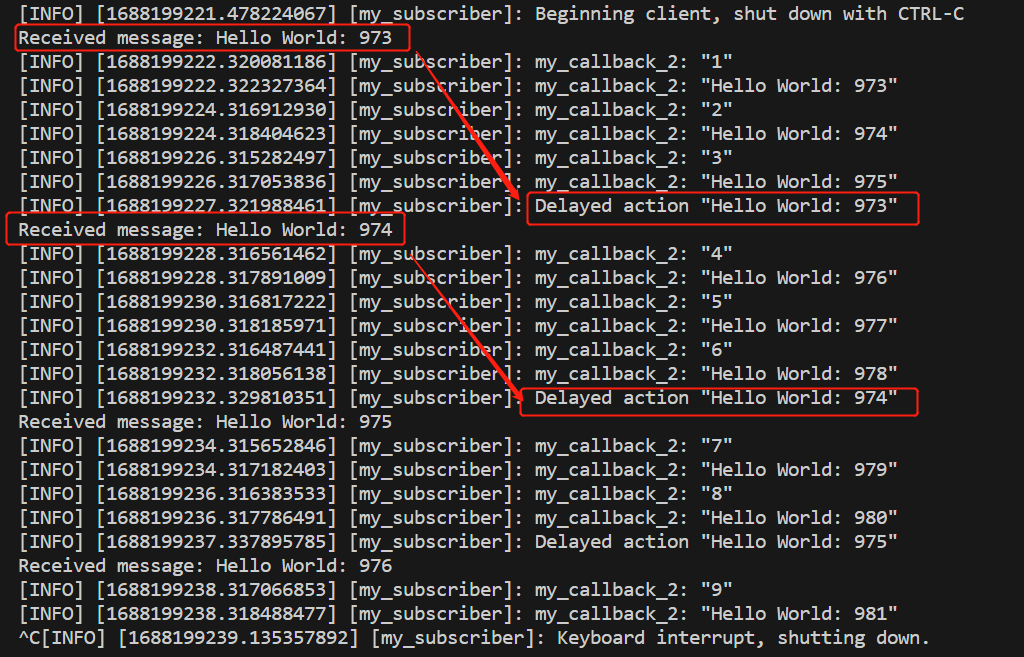
ros2_sub_delay_exe
此处使用ros2的定时器方法,实现延迟执行
ros2_sub_delay_exe
timer = self.create_timer(1.0, self.delayed_action)
create_timer() 是Node类的一个方法,用于创建一个定时器。
当定时器被创建后,它会以指定的时间间隔周期性地触发,然后调用所设置的回调函数self.delayed_action。你可以在delayed_action() 方法中编写执行操作的代码,这些操作将在每次定时器触发时执行。
使用定时器可以很方便地实现在指定的时间间隔后执行某些操作,而不必阻塞主循环。这对于处理需要按照特定时间间隔执行的任务非常有用,例如周期性地发布消息或执行传感器读取等操作。
当回调函数callback()被调用时,它会执行一些操作(如打印消息)后,创建一个新的定时器self.timer。定时器将以1秒的时间间隔周期性地触发,并调用回调函数self.delayed_action。这个定时器是在每个回调函数中动态地创建的,所以每个回调函数都有自己独立的定时器实例。
一旦回调函数执行完毕,定时器就会被释放。这是因为定时器的生命周期与回调函数的生命周期绑定在一起:它们是在同一个作用域内定义的并且没有被存储为类成员变量。一旦回调函数完成执行,定时器不再被引用,它的相关资源将被自动释放。
ros2_sub_coroutines_in_callback
在回调函数中使用协程
ros2_sub_coroutines_in_callback
ros2_sub_coroutines_in_callback_2
ROS 2中,协程需要与事件循环一起使用才能正常工作。
在上述代码中,我们在MyNode类的构造函数中获取了事件循环(loop = asyncio.get_event_loop())。然后,在回调函数中,我们创建了一个任务(task = self.loop.create_task(self.my_coroutine())),并将其添加到事件循环中(self.loop.run_until_complete(task))。这样,协程的逻辑代码就能在正确的上下文中运行了。
请确保在主程序中调用run_until_complete()方法来启动事件循环,并且确保协程使用了await关键字来等待异步操作完成。
- 获取事件循环:在ROS 2中,可以通过asyncio.get_event_loop()方法来获取事件循环对象。事件循环负责调度和执行各种协程任务。
- 创建协程函数:定义一个async修饰符下的协程函数,可以使用async def语法来声明。在协程函数中,我们可以编写异步逻辑代码。例如,在示例中的my_coroutine函数中,我们使用了await asyncio.sleep(1)来模拟耗时操作。
- 创建任务并添加到事件循环:在回调函数中,我们可以使用事件循环的create_task方法创建一个任务,并将协程函数作为参数传递给它。然后,使用run_until_complete方法运行事件循环,直到任务完成。
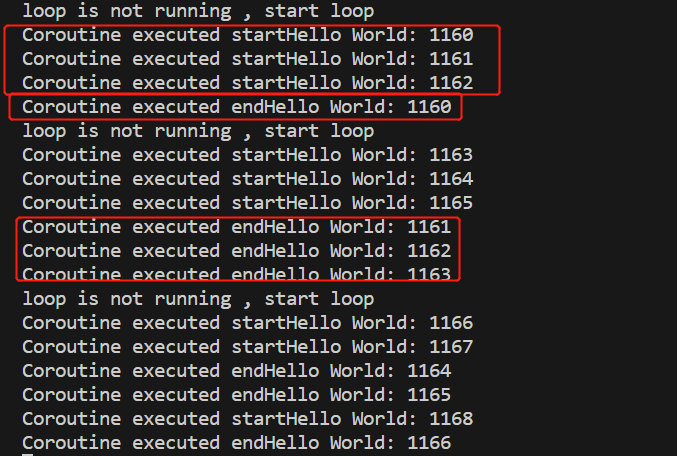
ros2_sub_Reentrant_coroutines_in_cb
ros2_sub_Reentrant_coroutines_in_cb
结合由于某个回调中使用协程时可能存在延迟操作,此时该回调函数会阻塞该回调函数的队列(仅指该回调函数),此处利用可重入实现每个回调的并发。
效果如下图所示: